Intelectual Property
Laterally Unconstrained Magnetic Joint is a disruptive technology which enables direct three-point actuation of mirrors and other payloads in tip, tilt, and piston axes.
- Vladimir G. Krylov, “Magnetic joint and optical mount using the same” U.S. Patent 10,685,771, issued June 16, 2020
- Vladimir G. Krylov, “Laterally unconstrained magnetic joint for tip tilt and piston-tip-tilt mounts” U.S. Patent 10,830,988, issued November 10, 2020
Laterally Unconstrained Magnetic Joint
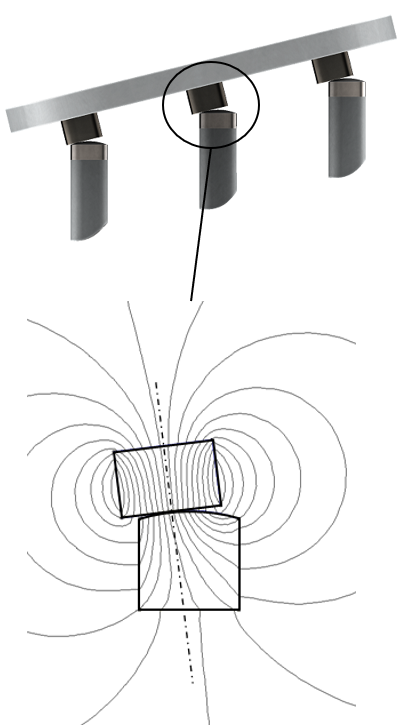
Laterally Unconstrained Magnetic Joint addresses the challenges of three-point actuation by having two mating parts, one which is made from a permanent magnet material and another from a ferromagnetic material. Strong axial magnetic attraction force capable of withstanding accelerations of 20g – 40g with proportionally sized payload. Flat (on the mirror side) and spherical (on the actuator side) mating surfaces allow pivoting action and laterally decouple actuator from the mirror. Lateral magnetic centering force retains joint integrity over the range of actuation angles. Flat joint interfaces forming a plane parallel to the front mirror surface make pointing independent from the lateral position of the mirror.
Typical Laterally Unconstrained Magnetic Joint comprises:
- Axially magnetized cylindrical permanent magnet attached to the mirror on one side. The other side is expected to have a bearing surface which can be polished nickel plating, bonded sapphire disk, or other method of improving surface flatness, lubricity, or hardness while minimizing the resulting magnetic gap
- Ferromagnetic part, typically having a matching diameter and spherical radius of high accuracy and surface quality interfacing the bearing surface. The other side of this part will have features interfacing the actuator.
Maximum actuation angle of the joint will be the function of joint spherical radius and joint diameter.
Multi-Axis Scanner™

Multi-Axis Scanner™ utilizes three laterally unconstrained magnetic joints coupling linear actuators to a mirror. The actuators are equally spaced for more uniform mirror support. Actuator motor and linear position detector technology can be matched to the scanner application, performance requirements, and operating environment. One Multi-Axis Scanner™ model having a set actuator placement, travel distance, and position sensor can support a range of mirror sizes and application apertures. Home sensor can be implemented using reflection from the back side of the mirror. Direct mirror angle detection is possible for transparent mirror substrates with dielectric coatings having a transmission band.
Desired deflection angles of the scanner are translated into linear actuator offsets using basic mathematical equations suitable for FPGA controller implementation. Simple component shapes and minimum number of interfaces reduce overall system error. Many mechanical tolerances can be calibrated out. Same controller with the programmed data translation logic can be used with any Multi-Axis Scanner™ implementation as related to actuator placement, joint geometry, motor type, and linear encoder selection.